A Saab e o desenvolvimento dos sistemas de controle de voo
Saab AJS 37 Viggen
Este texto descreve como a Saab trabalhou no desenvolvimento de sistemas de controle de voo para aviões militares e como a Saab evoluiu nessa área de tecnologia.
Vamos descrever como os diferentes sistemas de controle de voo se desenvolveram desde a década de 1940 até o JAS 39 Gripen (doravante denominado “Gripen”) na década de 2000.
Este sistema de controle de voo é um dos sistemas mais avançados encontrados em aviões de combate militar. O que realmente diferencia o nível operacional em um avião de combate militar é a funcionalidade e o desempenho do sistema de controle de voo.
Para ver o desenvolvimento de sistemas de controle de voo para aeronaves militares de combate em contexto, primeiro precisamos entender a base de como os sistemas de controle de voo funcionam. Este capítulo também descreverá em particular como os sistemas de controle de voo e as soluções de sistema foram desenvolvidos para os diferentes aviões de combate da Saab.
{kind=link}
Contexto
Uma das questões mais centrais da Força Aérea Sueca foi reduzir a vulnerabilidade de todo o sistema de defesa aérea. Na década de 1950, a força aérea havia percebido as vulnerabilidades associadas às bases aéreas fixas, e desenvolveu um conceito para bases de estradas ao longo de estradas normais.
Essas bases em rodovias também tinham áreas de estacionamento adjacentes com capacidade de manutenção para aeronaves. Como conseqüência, a aeronave precisa de boas características de decolagem e pouso, já que o comprimento da pista em uma estrada é muito limitado.
Essas condições formaram a base para a construção da aeronave que a Saab desenvolveu. O sistema de controle de voo para todas as aeronaves é um sistema primário que tem uma influência significativa no desempenho de uma aeronave.
Sumário
Ao longo dos anos, a Saab desenvolveu sistemas de controle de voo para diferentes tipos de aeronaves militares de combate.
Em uma aeronave convencionalmente estável estaticamente, a aeronave tem uma estabilidade inerente “embutida”, que requer uma grande área de asa e causa muito arrasto que atrasa a aeronave em uma curva. Esse tipo de sistema de controle de voo foi usado em todas as aeronaves da Saab, inclusive no Saab JA 37 Viggen.
No início da década de 1980, foi iniciado o projeto experimental ESS01, para demonstrar que a Saab poderia voar usando um sistema de controle digital elétrico assíncrono de três canais. Isso deveria ser adaptado para uso nas futuras aeronaves Gripen.
Foi aqui que começou a jornada de mudança em direção a um sistema de controle de voo digital elétrico com total autoridade. Isso abriu o caminho para uma aeronave básica estaticamente instável, bem como para as características de voo dramaticamente aprimoradas das aeronaves modernas estaticamente instáveis.
O Gripen é um avião moderno com desempenho que apenas um avião estaticamente instável que corta o ar com pouca perda de energia pode alcançar. O Gripen é fundamentalmente uma aeronave instável, e essa instabilidade deve ser compensada continuamente usando comandos ativos do piloto automático para não divergir.
As vantagens de uma aeronave básica estaticamente instável são, portanto, menos resistência devido à menor área da asa e às forças que trabalham juntas na aeronave. Além disso, uma aeronave básica estaticamente instável que é estabilizada por um sistema de controle de voo que funciona continuamente e oferece melhor desempenho de curva estacionária e melhor preservação de energia.
O piloto pode pilotar a aeronave Gripen “despreocupado” sem ter que pensar em todas as diferentes limitações da aeronave, podendo assim se concentrar totalmente em sua missão tática.
{kind=link}
Descrição do conteúdo
- Uma breve descrição dos sistemas de controle de voo e as diferentes soluções de sistema usadas nos vários aviões de combate da Saab.
- Para que o piloto possa se concentrar no controle da aeronave, na busca de alvos e na manutenção de uma visão geral da situação tática, a pilotagem da aeronave precisa ser despreocupada (carefree).
- O Gripen é inerentemente instável e, portanto, deve ser compensado continuamente usando um contra-comando ativo do piloto automático para não divergir.
Desenvolvimento Histórico de Sistemas de Controle
Sistema de controle mecânico
O Saab J 21 foi desenvolvido na década de 1940 e apresentava um design com barras de cauda duplas e uma hélice montada na traseira. Foi a primeira aeronave da Força Aérea Sueca a usar trem de pouso frontal. O design da aeronave ofereceu boa visibilidade ao piloto, mas resultou em problemas de refrigeração do motor e a hélice poderia ferir o piloto caso ele precisasse deixar a aeronave em voo. Como conseqüência, a Saab desenvolveu um assento ejetor movido a pólvora que disparava o piloto para fora e sobre a área perigosa da hélice. Após o fim da Segunda Guerra Mundial, em 1945, a Suécia ganhou acesso a motores a jato estrangeiros e uma versão do Saab J21 com um motor a jato foi desenvolvida como o Saab J21R.
Saab J21
Os primeiros sistemas de controle da década de 1940, como os do Saab J21, eram mecanicamente reversíveis, onde o piloto podia sentir a força do ar nas superfícies de controle através do sistema de controle mecânico, à medida que as forças eram devolvidas ao manche. Altas velocidades resultavam em maiores forças no manche e, portanto, em menores movimentos da superfície de controle. Velocidades baixas resultavam em forças mais baixas no manche e, portanto, em movimentos maiores da superfície de controle.
{kind=link}
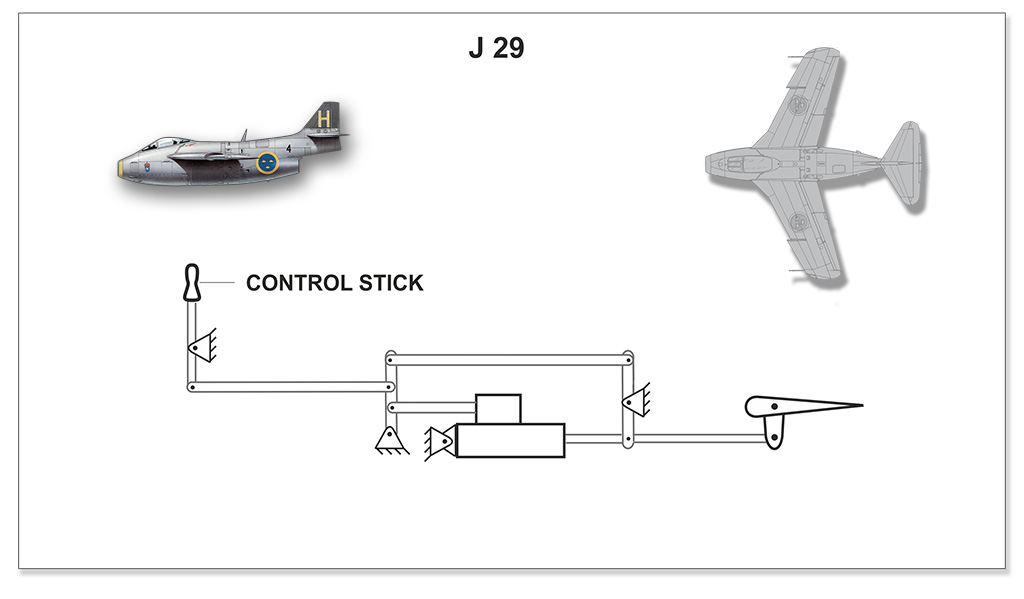
Saab J 29
A década de 1950 assistiu ao desenvolvimento do caça sueco monomotor Saab J 29, que recebeu o apelido de “O Barril Voador”. A partir de 1954, todas as aeronaves de combate e ataque foram reconstruídas e equipadas com pós-combustores, permitindo que a aeronave estabelecesse recordes de velocidade para a época. Naquele tempo, o J 29 era considerado igual às melhores aeronaves F-86 americanas e MiG-15 soviéticas.
Devido às altas velocidades, o piloto precisava de ajuda para controlar as superfícies de controle em alta velocidade, de modo que o sistema de controle de voo no Saab J 29 foi equipado com assistência servo. O piloto ainda conseguia sentir a força do ar nas superfícies de controle, controladas através do manche.
{kind=link}
Saab J 32
A última parte da década de 1950 assistiu ao desenvolvimento do Saab 32 Lansen, que era um avião de caça de dois lugares com capacidade para qualquer clima, que apresentava três variantes principais. O Saab A 32A era uma versão de ataque com capacidade para qualquer clima. A versão de caça com capacidade para qualquer clima foi chamada Saab J 32B e a versão de reconhecimento foi denominada Saab S 32C.
O Saab J 32B Lansen foi o primeiro avião sueco a quebrar a barreira do som. A aeronave estava sujeita a forças muito altas, com o piloto precisando de ajuda do servo para controlar as superfícies de controle. Isso significava que o piloto não conseguia mais sentir a força do ar através do manche, de modo que a sensação do manche de controle artificial foi implementada usando molas e amortecedores.
{kind=link}
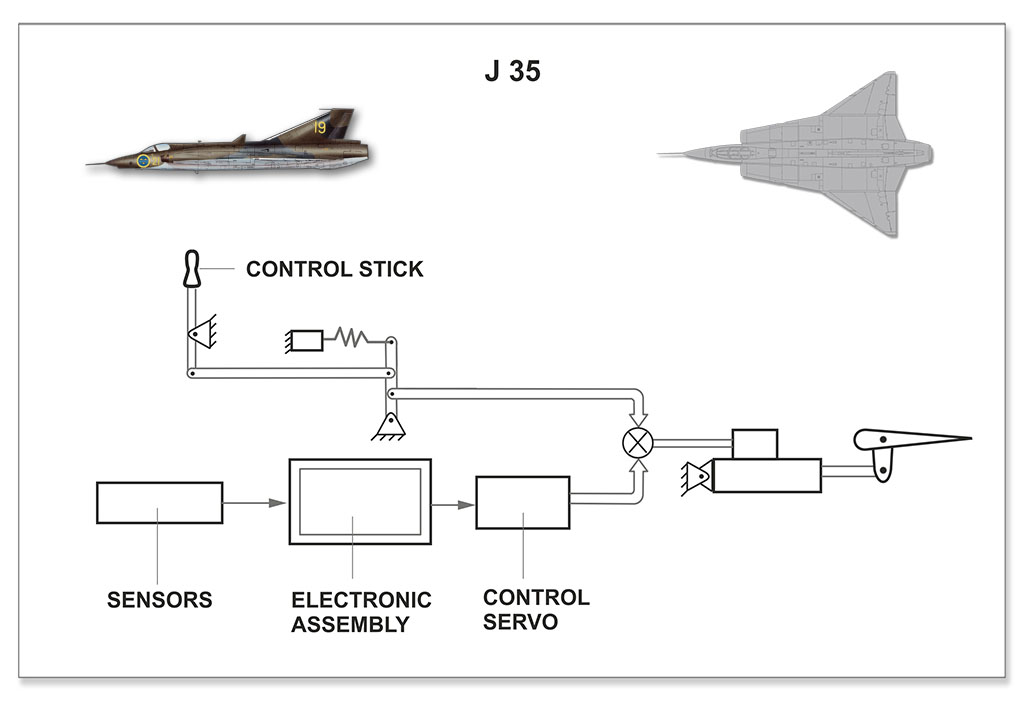
Saab J 35
O Saab J 35 Draken foi desenvolvido para atender à necessidade de um caça que pudesse interceptar os novos bombardeiros com ogivas nucleares introduzidos na década de 1950.
O design da aeronave foi baseado em uma fuselagem estreita com uma configuração de asa duplo delta. Esse tipo de asa oferecia boas características de voo em alta velocidade, graças à asa interna, mais em forma de flecha. A asa externa era complementar, apresentando bom desempenho em baixas velocidades.
O Saab J 35 Draken foi projetado para interceptar aeronaves inimigas supersônicas, o que significava que era necessário servo completo e, além disso, assistência de um sistema de piloto automático para melhorar as características de inclinação pouco amortecidas em velocidades supersônicas. As características de voo foram aprimoradas com o auxílio do piloto automático, enquanto o senso do piloto quanto às características de controle foi determinado pelo sistema de controle mecânico.
{kind=link}
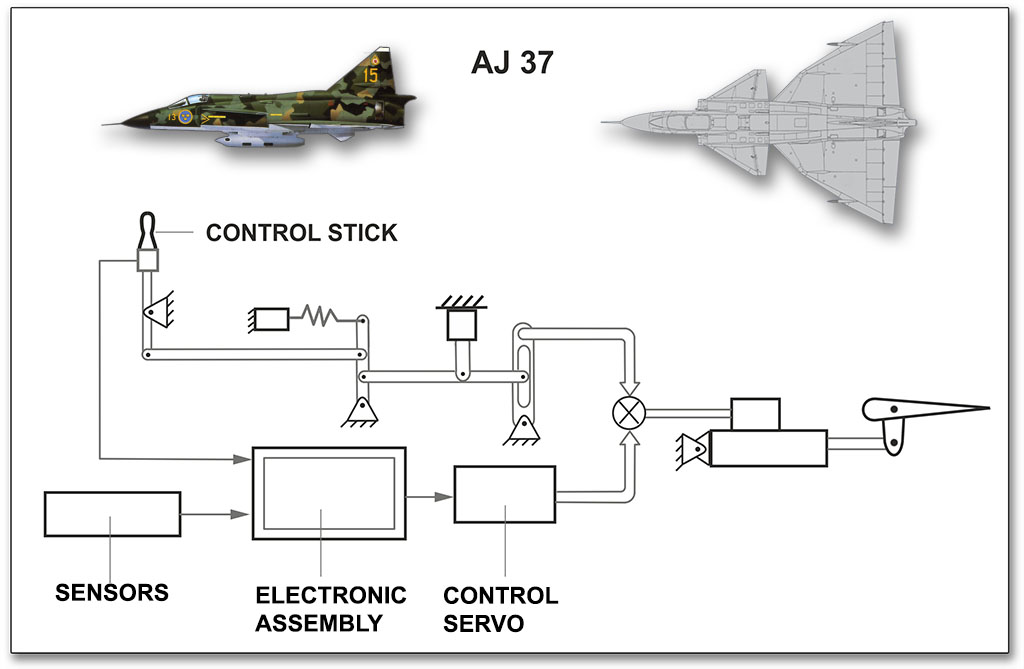
Saab 37
O Saab 37 Viggen era um avião de combate que vinha em quatro variantes diferentes, além de um treinador (SK 37). A aeronave possuía uma configuração de asa duplo delta com as chamadas asas de canard (asas extras à frente das asas principais), que permitiam pousar em velocidades mais baixas. Um sistema de reversão possibilitou alterar a direção do fluxo de ar com a ajuda de um reversor de empuxo ao pousar. Isso resultou na aeronave ser capaz de pousar em uma distância muito curta: menos de 500 m, mesmo em superfícies escorregadias.
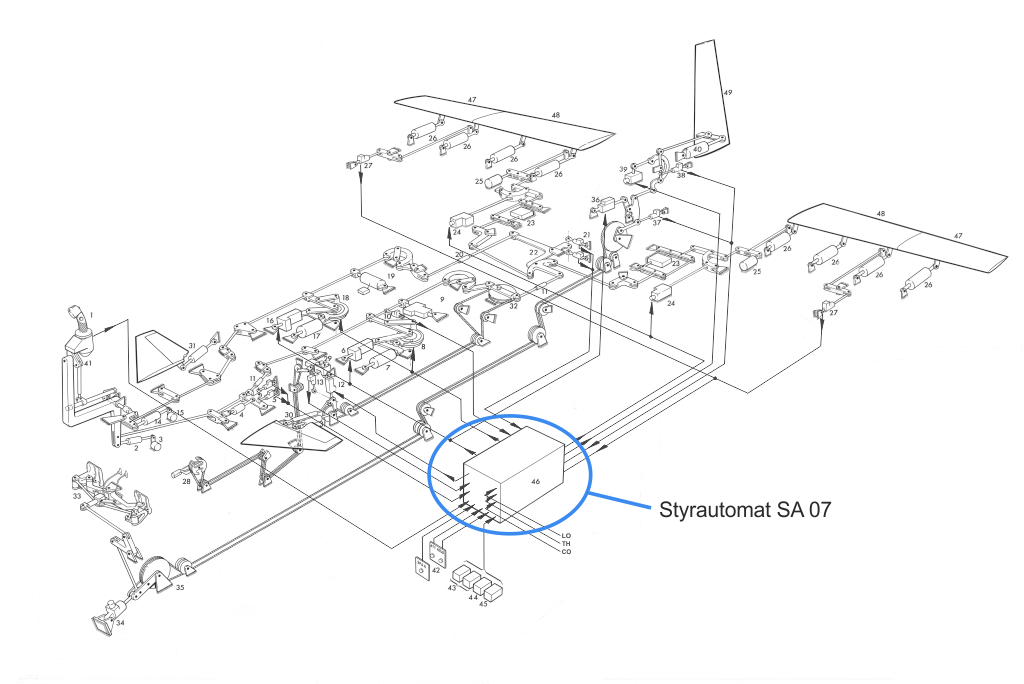
O AJ 37 Viggen foi um estágio mais avançado, melhorando ainda mais o senso do piloto quanto às características de controle, usando um sensor de força no manche. As características de voo foram aprimoradas com a adição de sinais de estabilização e amortecimento do piloto automático aos comandos das superfícies de controle. O piloto automático no AJ 37 Viggen era analógico. Os componentes dos pilotos automáticos analógicos têm tolerâncias variadas, o que significa que cada aeronave era única e poderia exibir características de voo ligeiramente diferentes.
{kind=link}
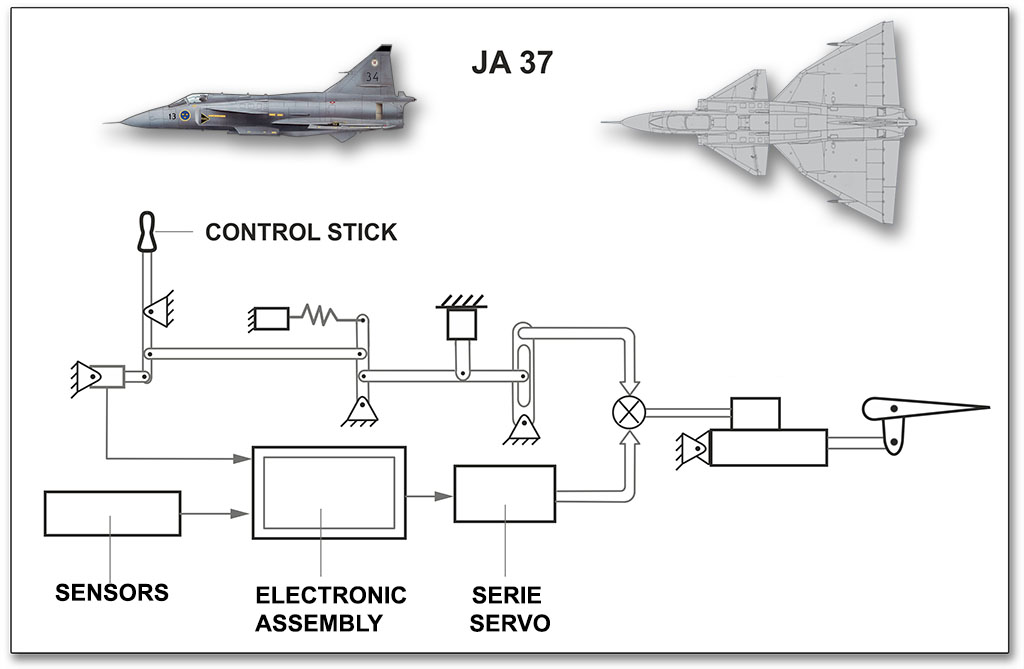
O Saab JA 37 Viggen foi a primeira aeronave do mundo a apresentar um sistema de controle digital adicionado ao sistema de controle mecânico básico. O sistema de controle digital do JA 37 podia eliminar as variações de tolerâncias encontradas nos sistemas de controle analógicos.
{kind=link}
{kind=link}
Todas as aeronaves descritas acima eram aeronaves básicas estaticamente estáveis, que podiam ser pilotadas usando apenas seus sistemas de controle de voo mecânicos.
Sistemas elétricos de controle digital
No início dos anos 80, começou o projeto experimental ESS01, para demonstrar que a Saab podia voar usando um sistema de controle digital elétrico assíncrono de três canais para a futura aeronave Gripen. Foi nesse ponto que a jornada de mudança da Saab em direção a um sistema de controle de vôo digital elétrico com total autoridade começou, abrindo caminho para uma aeronave básica estaticamente instável e as características de vôo dramaticamente aprimoradas de tais aeronaves estaticamente instáveis modernas.
{kind=link}
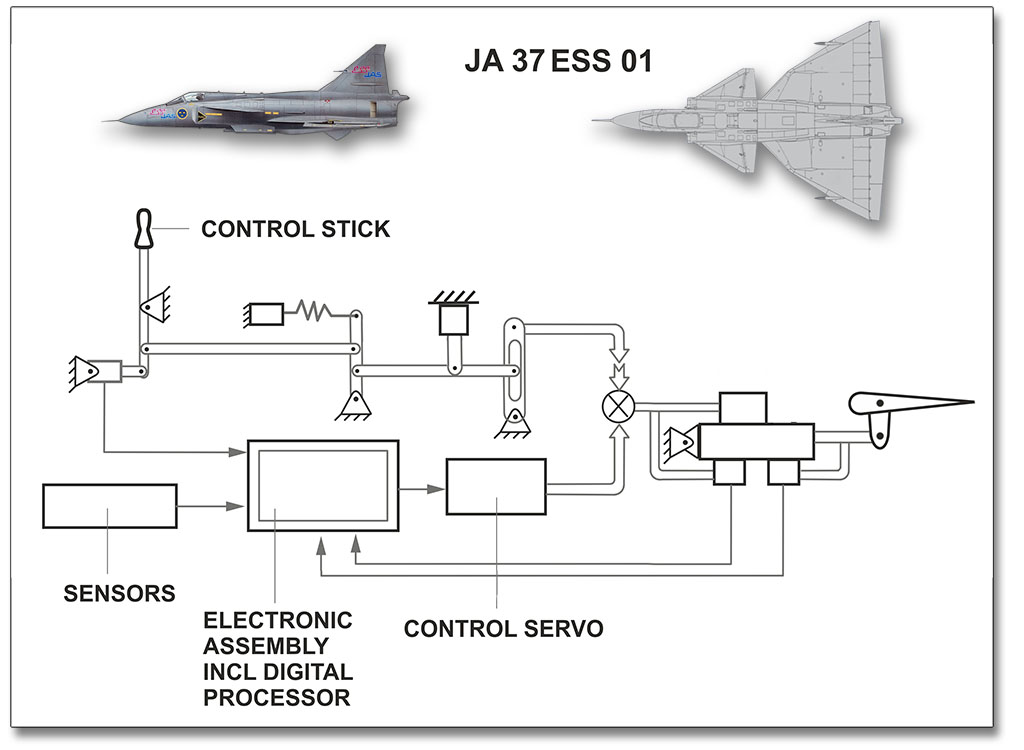
JA 37-21 ESS01
Um Saab JA 37 Viggen foi reconstruído em uma aeronave experimental chamada JA 37-21 ESS01, que foi usada para testar um sistema de controle de voo elétrico com autoridade total. A mudança significou que o sistema de controle de voo da aeronave se tornou um sistema de controle digital elétrico de autoridade completa assíncrono em três canais (superfície de controle da bordo de fuga de ± 30 graus) com um sistema de backup mecânico.
{kind=link}
Outros sistemas de controle
Como comparação, o Tornado e o Concorde usavam sistemas de controle semelhantes. O Tornado é um caça bimotor que foi desenvolvido em três variantes, projetadas por um consórcio multinacional composto por empresas do Reino Unido, Alemanha Ocidental e Itália. O Concorde era um avião supersônico de passageiros e foi desenvolvido em colaboração entre a empresa francesa Aérospatiale e a BAC no Reino Unido.
JAS 39 Gripen
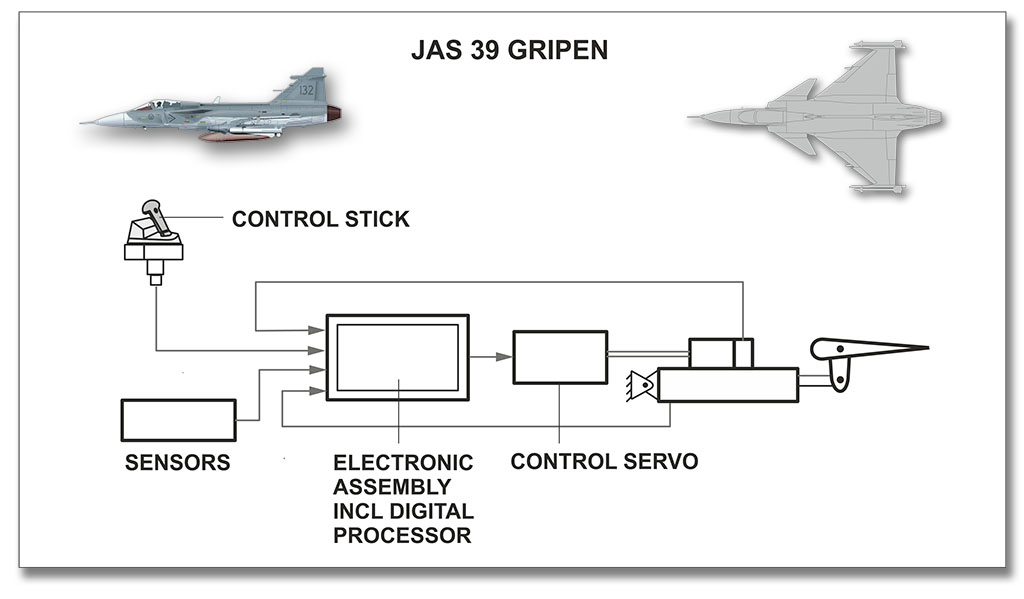
A experiência adquirida com o JA37 formou a base para o projeto do sistema de controle de voo em veículos aéreos posteriores; um aspecto em particular é o monitoramento dos cálculos, que foi usado como base no desenvolvimento do piloto automático do Gripen, designado SA11.
O Gripen é um avião moderno estaticamente instável, com desempenho tão bom que corta o ar com pouca perda de energia. Essa instabilidade deve ser compensada continuamente usando um contra-comando ativo do piloto automático para não divergir.
{kind=link}
Noções básicas do sistema de controle
Para entender a função de um sistema de controle de voo, descrevemos abaixo a diferença entre aeronaves convencionais estaticamente estáveis e modernas estaticamente instáveis.
{kind=link}
Aeronaves estaticamente estáveis convencionais
{kind=link}
Em uma aeronave convencional estaticamente estável, a aeronave possui uma estabilidade inerente, que requer uma grande área de asa que causa muito atrito que diminui a velocidade da aeronave ao fazer curvas.
Exemplos de aeronaves convencionais estaticamente estáveis incluem o Saab J 29 Tunnan, o Saab J 32 Lansen, o Saab J35 Draken e o Saab AJ/JA 37 Viggen.
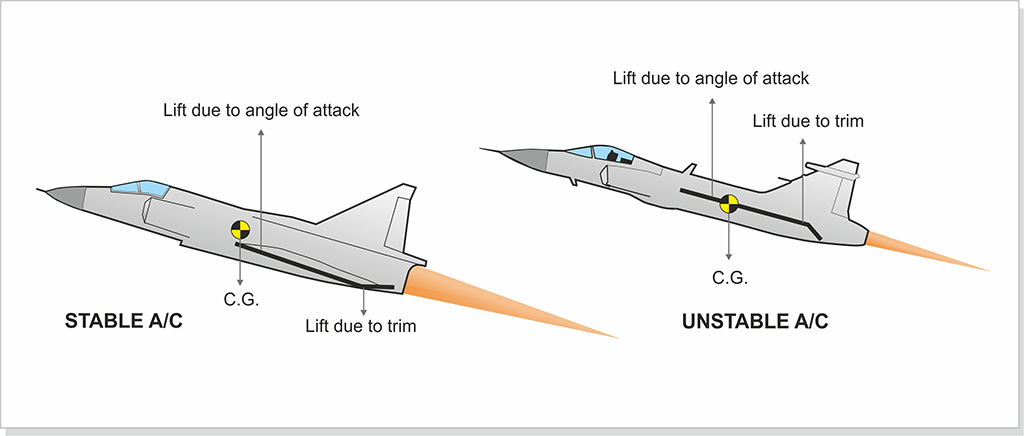
Em uma aeronave convencional estaticamente estável, a sustentação da asa atua atrás do centro de gravidade, fazendo com que a aeronave flutue livremente automaticamente contra o vento. A aeronave tem um momento aerodinâmico naturalmente restaurador e, portanto, estabilidade natural.
Para que a aeronave gire, o nariz deve ser sustentado por uma contra-força descendente das superfícies de controle. Isso significa que a sustentação da asa deve compensar a força descendente das superfícies de controle, a fim de manter o fator de carga e a sustentação na curva. Isso significa que a área da asa deve ser grande, resultando em muito arrasto.
O piloto controla as superfícies de controle através do manche para curvar a aeronave. Uma aeronave básica estaticamente estável pode ser pilotada usando apenas um sistema de controle mecânico, pois as características de voo estabilizadoras da aeronave são inerentes ao seu design aerodinâmico.
A desvantagem de uma aeronave estaticamente estável é que ela requer uma grande área de asa para compensar a força descendente nas superfícies de controle, o que significa muito arrasto e grande perda de energia ao girar e, portanto, uma grande redução no desempenho da curva. A velocidade de pouso também é maior à medida que a força das superfícies de controle contraria a sustentação da asa. Além disso, uma aeronave estaticamente estável se torna ainda mais estável ao voar em velocidades supersônicas, o que significa que as superfícies de controle devem ser controladas com maior amplitude na direção oposta. Como a pressão dinâmica afeta as forças da superfície de controle, é necessário instalar servos de controle poderosos, aumentando o peso total.
Para resumir, as aeronaves convencionais estaticamente estáveis costumam usar sistemas de controle básico mecânico com um grande número de não linearidades, como atrito, histerese e zonas mortas, o que prejudica as características de controle.
Uma zona morta é um intervalo em um domínio de sinal no qual nenhuma ação ocorre. A potência de saída de um sinal enviado por uma não linearidade como uma “zona morta” depende da magnitude do sinal. Um pequeno sinal através de uma “zona morta” acaba não emitido, enquanto um grande sinal passa reduzido pelo tamanho da zona morta.
A histerese é a dependência baseada no tempo na saída de um sistema de entrada de informações.
Aeronaves estaticamente instáveis modernas
{kind=link}
Uma aeronave moderna estaticamente instável carece de estabilidade inerente e, portanto, requer estabilização artificial contínua. A área da asa é menor e, portanto, apresenta menos resistência.
Em uma aeronave moderna estaticamente instável, a sustentação da asa atua em frente ao centro de gravidade da aeronave; uma aeronave estaticamente instável não tem momento aerodinâmico de restauração natural, isto é, nenhuma estabilidade inerente. A sustentação da asa deve ser compensada continuamente pelo sistema de controle de voo.
As forças nas superfícies de controle agem na mesma direção que a sustentação da asa para criar um contra-momento de compensação. Essas forças são combinadas na sustentação total que atua na aeronave, o que significa que a asa de uma aeronave estaticamente instável moderna pode ser muito menor, o que proporciona menos resistência. Isso permite que a energia seja melhor preservada.
Em velocidades supersônicas, a sustentação da asa recua ainda mais para 40% da corda (a corda é a linha reta da extremidade anterior à extremidade posterior da asa). Isso significa que as aeronaves estaticamente instáveis modernas se tornam estaticamente estáveis em velocidades supersônicas.
Uma aeronave básica estaticamente instável precisa de estabilização contínua com a ajuda de um sistema de controle de voo ativo com total autoridade.
No entanto, em velocidades supersônicas, há menos movimento da superfície de controle em comparação com uma aeronave convencional estaticamente estável. Isso significa que as aeronaves estaticamente instáveis modernas não precisam dos mesmos servos de controle poderosos e pesados.
A aeronave corta o ar. A velocidade de aterrissagem é reduzida à medida que todas as forças que atuam na aeronave se combinam para sustentar a aeronave, enquanto a desaceleram e reduzem sua velocidade.
Comparação entre o JAS 39 Gripen e o JA 37 Viggen
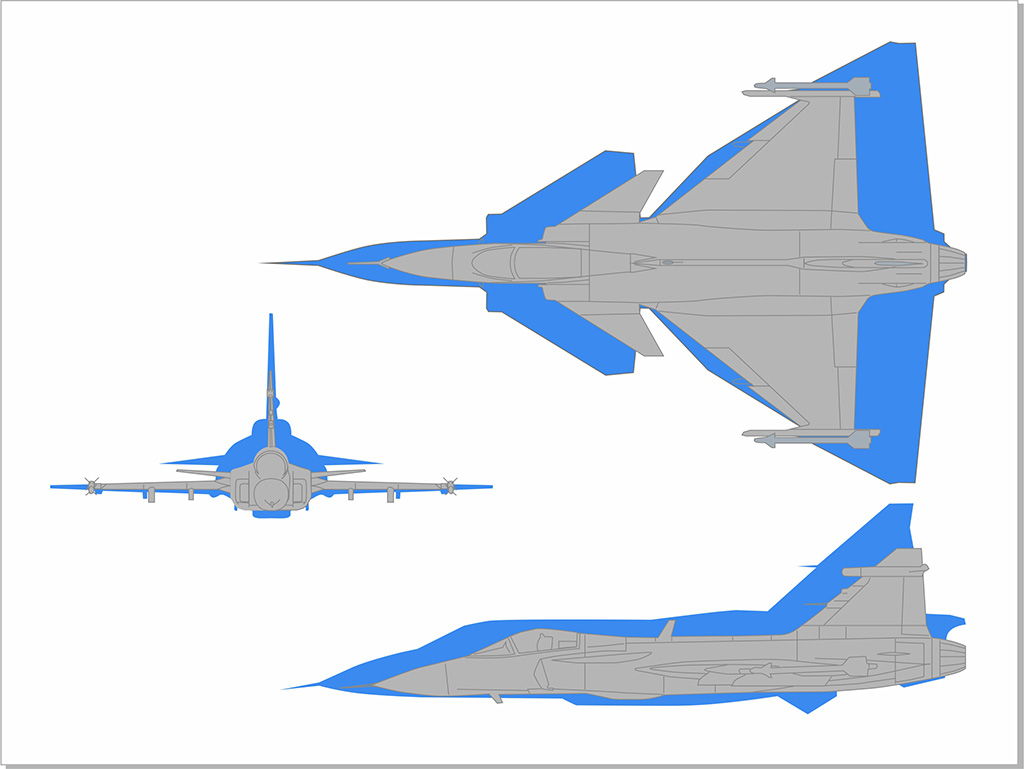
A figura abaixo ilustra a diferença na área da asa e no posicionamento entre o JAS 39 Gripen, uma aeronave básica estaticamente instável moderna (mostrada em cinza) e o JA 37 Viggen, uma aeronave convencional estaticamente estável (mostrada em azul).
{kind=link}
{kind=link}
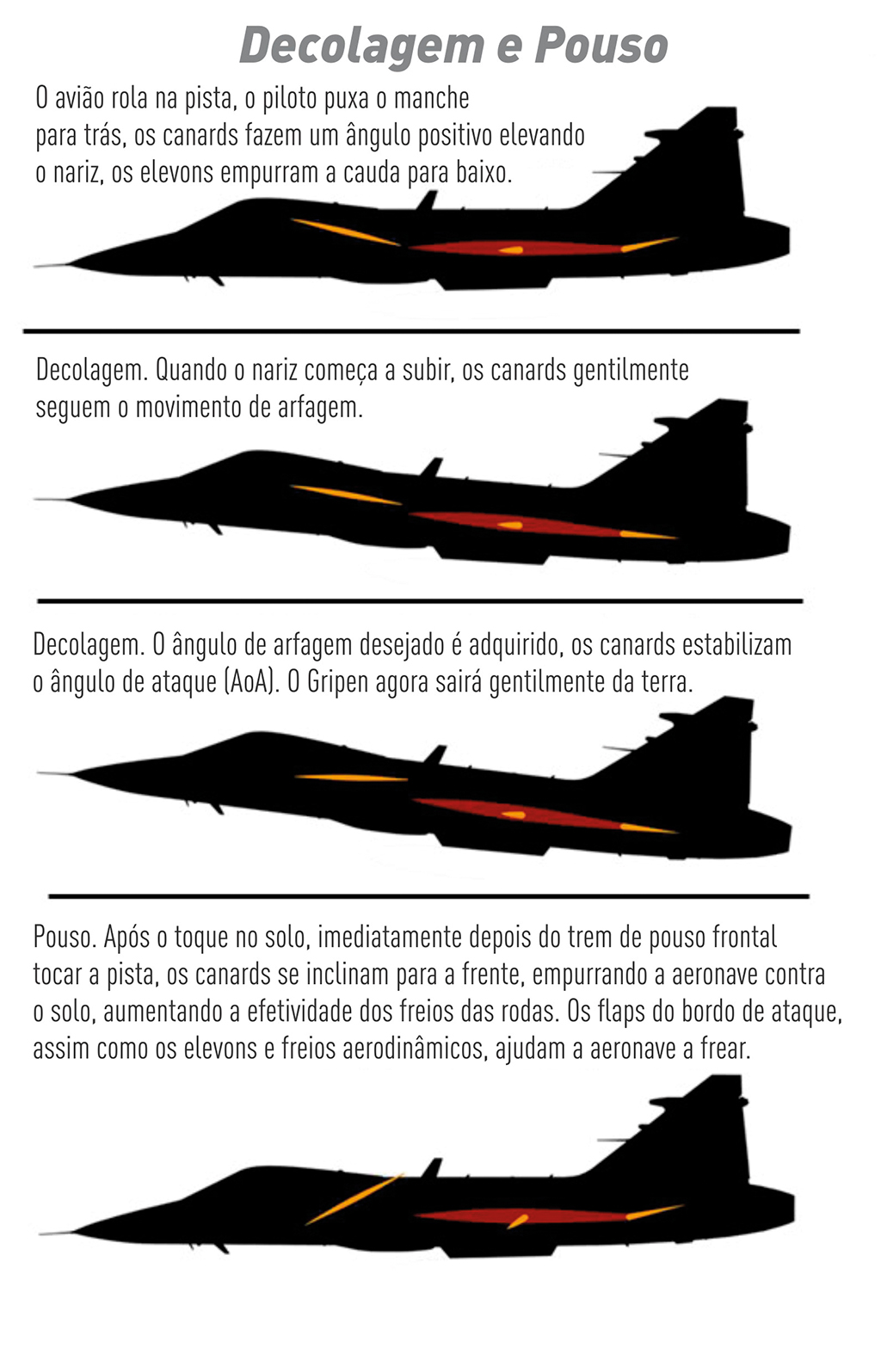
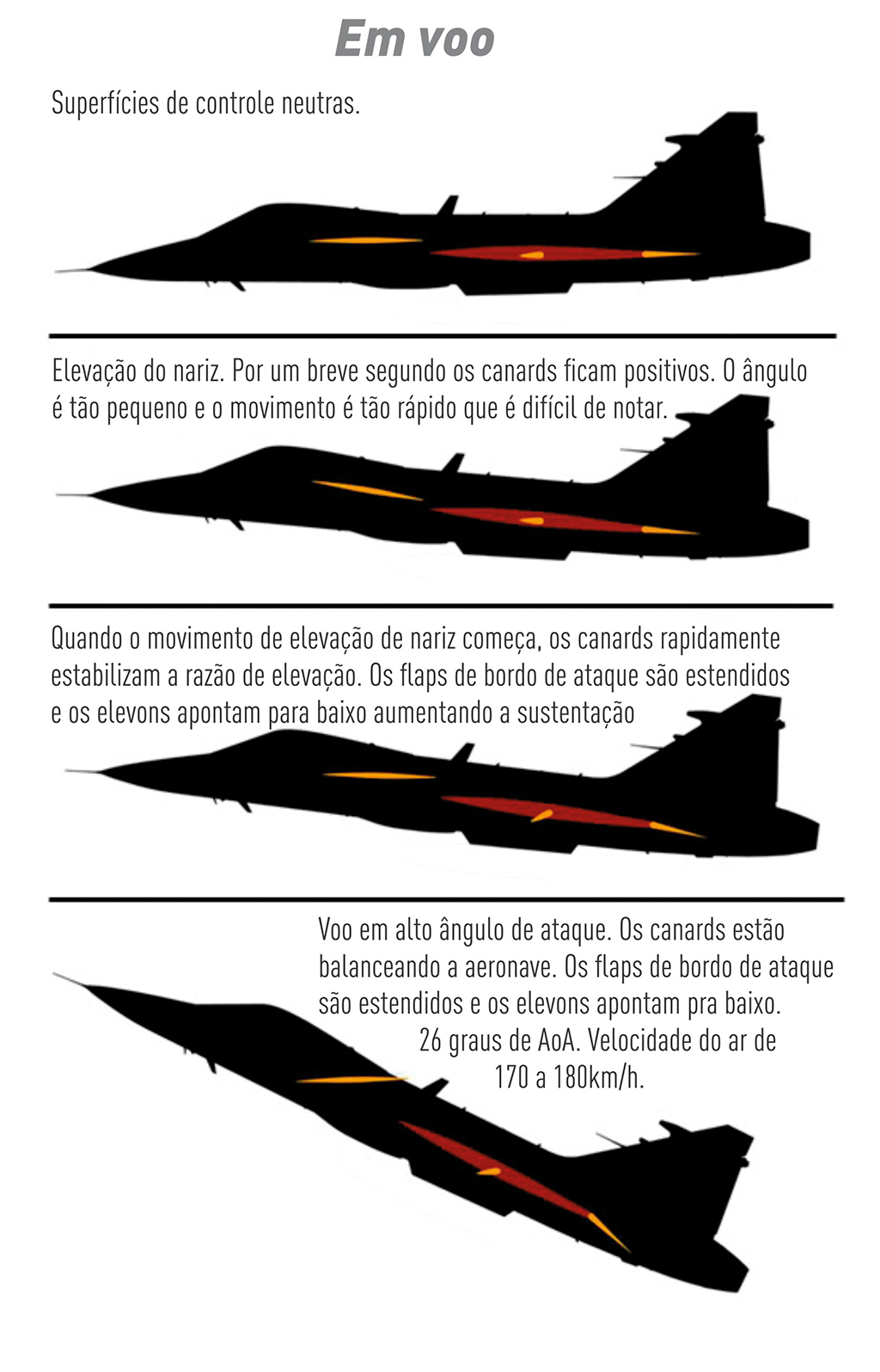
A atuação das superfícies de controle do Gripen
{kind=link}
{kind=link}
FONTE: saabaircraftindustry.com